В настоящее время для стабилизации скорости вращения ротора электродвигателя постоянного тока широко применяется так называемая мостовая схема, впервые предложенная Г. И. Эйзером для транзисторного магнитофона «Мрия». Особенность такой схемы заключается в том, что она не требует наличия центробежного регулятора и надежно работает при изменении как момента нагрузки на валу электродвигателя, так и напряжения питания. Единственное требование, которое предъявляется к электродвигателю,- наличие щеток с линейной зависимостью переходного сопротивления от тока, например металлических.
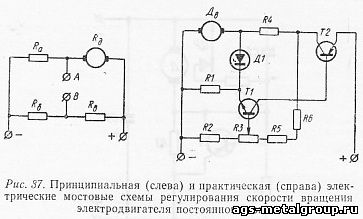
На рис. 37, слева показана принципиальная схема моста, где сопротивление обмотки ротора Рд образует одно плечо моста, резистор Ра - другое, а недостающие для равновесия моста сопротивления - резисторы Рб и Рв. Вы, несомненно, знаете, что при балансе моста изменение напряжения в одной из его диагоналей не вызывает появления тока в другой диагонали. Но как только баланс моста нарушается, всякое изменение напряжения в одной диагонали вызывает появление тока в другой диагонали, и этот ток можно использовать для управления работой электродвигателя.
Условие равновесия рассматриваемого нами моста выражается формулой Ра/Рд = Рб/Рв, где Рд - суммарное сопротивление обмотки ротора и скользящего контакта между коллектором и щетками. В этом случае напряжение U ав между точками А и В моста прямо пропорционально скорости вращения ротора n, выражается формулой U ав = k x n и не зависит от момента нагрузки на вал электродвигателя и напряжения источника питания.
В практической схеме, показанной на том же рисунке справа, управление скоростью вращения вала электродвигателя производится путем сравнения напряжения U ав с опорным напряжением на стабилитроне Д1 и получения разностного сигнала, который после усиления транзистором Т1 управляет проходным транзистором Т2. Работа последнего аналогична работе такого же транзистора в схеме с центробежным регулятором. Функцию резистора Ра мостовой схемы здесь выполняет резистор Р4, а остальных - резисторы Р2, Р3, Р5 и Р6. Переменным резистором Р3 можно изменять соотношение плеч моста и тем устанавливать его баланс при номинальном напряжении питания. Резистор Р5, входящий в одно из плеч моста, представляет собой катушку из медного провода, сопротивление которой подобрано с таким расчетом, чтобы обеспечить минимальное изменение скорости вращения ротора из-за изменения температуры окружающей среды.
В магнитофонах с питанием от электрической сети переменного тока, как мы говорили выше, используют однофазные синхронные и асинхронные электродвигатели, к рассмотрению принципа действия которых мы теперь приступаем.
Если бы в нашем распоряжении был коллекторный электродвигатель с обмотками на статоре, можно было бы проделать такой опыт. Удалив из электродвигателя ротор с коллектором и щетками, поставим на его место какой-либо стальной цилиндр, в котором по образующей его окружности просверлено ряд отверстий и в эти отверстия вставлены медные стержни, соединенные между собой. Вот эти стержни и образуют так называемую беличью клетку. Если теперь мы бы подвели к обмотке статора переменный электрический ток, например, от электрической сети, то электродвигатель начал бы гудеть, но ротор с места бы не сдвинулся. Гудение электродвигателя означало бы, что около статора образуется магнитное поле и это поле наводит в стержнях ротора, электрическое сопротивление которых во много раз меньше сопротивления самого ротора, э.д.с., то есть по стержням ротора проходят токи. Дотронувшись рукой до вала электродвигателя, мы бы почувствовали его дрожание - вибрацию. Если бы теперь мы попробовали резко крутануть вал в любую сторону, то ротор бы начал вращаться и остановить его было бы довольно трудно, так как электродвигатель обладал бы каким-то моментом вращения. Остановить ротор можно было бы только тогда, когда сила торможения превысила бы вращающий момент.
Рассмотренный нами опыт показывает принцип действия электродвигателя переменного тока. Он заключается в том, что э.д.с. в обмотке ротора (стержнях «беличьей клетки») наводится переменным полем статора. Следовательно, к обмотке ротора нет надобности подводить электрический ток, и такому электродвигателю не нужны скользящие контакты, то есть коллектор со щетками. Кроме этого, так как обмотка ротора не соединена с источником питания, ее можно не изолировать от сердечника ротора. Все это значительно упрощает конструкцию электродвигателя и увеличивает его надежность в работе. Если к этому добавить, что отсутствие скользящих контактов исключает помехи, неизбежно возникающие при постоянных разрывах электрической цепи, то станет понятно, почему такие электродвигатели нашли самое широкое применение в звукозаписывающей и звуковоспроизводящей аппаратуре.
Но как сделать, чтобы ротор электродвигателя начинал вращаться без посторонней помощи? Оказывается, это возможно в том случае, если магнитное поле статора также будет вращаться. Говоря иначе, нужно сделать так, чтобы магнитное поле статора постоянно сдвигалось. Тогда ротор будет следовать за таким полем и отпадет надобность запускать его вручную. Выяснилось также, что наиболее просто это можно осуществить расположением на статоре электродвигателя дополнительной обмотки и сделать так, чтобы магнитное поле дополнительной обмотки было сдвинуто на 90' по отношению к магнитному полю рабочей обмотки. Поэтому такую дополнительную обмотку называют фазосдвигающей. А осуществляется сдвиг фазы благодаря включению последовательно с обмоткой конденсатора постоянной емкости. Вот почему такие электродвигатели иногда называют еще и конденсаторными. Схема включения такого электродвигателя показана на рис. 38.
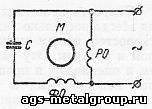
Рис. 88. Схема включения электродвигателя переменного тока, имеющего рабочую (РО) и фазосдвигающую (ФО) обмотки.
В электродвигателе переменного тока пакеты статора и ротора набирают из пластин, которые штампуют из специальной электротехнической стали. Отверстия в роторе всегда немного сдвинуты таким образом, чтобы образуемые ими стержни имели небольшой угол по отношению к полюсу. Сами отверстия заливают чистым алюминием так, чтобы все стержни, образуемые этими отверстиями, были соединены между собой. Таким образом получают «беличью клетку», о которой мы рассказывали выше.
Однофазные электродвигатели переменного тока могут быть синхронными и асинхронными (не синхронными). Исполнение электродвигателя зависит от конструкции ротора. В синхронных электродвигателях ротор имеет скосы, благодаря чему образуются явно выраженные полюса, а в асинхронном электродвигателе ротор круглый.
Скорость вращения ротора и синхронного электродвигателя переменного тока зависит от числа пар р полюсов его рабочей обмотки и частоты f питающей электрической сети и выражается формулой: n = 60f/p.
Из этой формулы видно, что скорость вращения ротора синхронного электродвигателя строго постоянна, если, конечно, постоянна частота электрического тока, питающего электродвигатель, и момент нагрузки не превышает вращающий момент.
Скорость вращения ротора асинхронного электродвигателя всегда несколько ниже. Объясняется это наличием разности скоростей между магнитными полями, создаваемыми статором и ротором. Эту разность скоростей называют скольжением и оценивают в процентах. У асинхронных электродвигателей, используемых в магнитофонах, скольжение обычно не превышает 10%. Скорость вращения асинхронного электродвигателя зависит еще и от момента нагрузки, прикладываемого к валу электродвигателя. Скорость будет тем меньше, чем больше механическая нагрузка на вал. Однако с увеличением момента нагрузки скольжение ротора практически не увеличивается и скорость вращения ротора почти не изменяется, если, конечно, нагрузка на вал электродвигателя постоянна и не превышает допустимую.
Электродвигатели переменного тока в зависимости от конструкции ротора могут иметь различную механическую характеристику, которая, как мы говорили выше, показывает зависимость скорости вращения ротора от момента нагрузки. Если увеличение момента нагрузки не вызывает изменения скорости вращения ротора, то считают, что такой электродвигатель обладает абсолютно жесткой механической характеристикой. В электродвигателях, обладающих жесткой механической характеристикой, происходит незначительное уменьшение скорости вращения ротора ат увеличения момента нагрузки. У электродвигателей с мягкой механической характеристикой даже небольшое увеличение момента нагрузки вызывает заметное уменьшение скорости вращения ротора.
Абсолютно жесткой механической характеристикой обладают, как правило, синхронные электродвигатели. Асинхронные электродвигатели в зависимости от конструкции ротора могут иметь жесткую или мягкую механическую характеристику. Если ротор асинхронного электродвигателя выполнен в виде «беличьей клетки» с низким омическим сопротивлением, то такой электродвигатель обладает жесткой механической характеристикой. Если же ротор сделать в виде «беличьей клетки», но с высоким омическим сопротивлением или же изготовить его из стали или чугуна, то механическая характеристика электродвигателя будет мягкой.
Механическая характеристика электродвигателя определяет его место в магнитофоне. Так, синхронный электродвигатель с абсолютно жесткой механической характеристикой используют, как правило, только в качестве ведущего электродвигателя в профессиональных магнитофонах с трехмоторным лентопротяжным механизмом. Иногда в таких конструкциях применяют и асинхронные электродвигатели с жесткой механической характеристикой. В качестве боковых электродвигателей в трехмоторных лентопротяжных механизмах используют асинхронные электродвигатели только с мягкой механической характеристикой. В одномоторных и двухмоторных лентопротяжных механизмах бытовых и любительских магнитофонов обычно применяют асинхронные электродвигатели с жесткой механической характеристикой.
Электродвигатели переменного тока, как и электродвигатели с питанием от источника постоянного тока, можно реверсировать. Чтобы изменить направление вращения ротора, достаточно поменять местами выводы от одной из обмоток: рабочей или фазосдвигающей. Это приведет к изменению направления вращения поля статора, а отсюда и к изменению направления вращения ротора.

