Совершенно иначе построен лентопротяжный механизм, кинематическая схема которого изображена на рис. 29 в. Такая кинематическая схема применена, например, в магнитофоне «Яуза-206». Здесь вращательные движения боковым узлам и ведущему валу передаются от электродвигателя 5 при помощи двух обрезиненных роликов 14 и 15, а подмотка магнитной ленты в режиме рабочего хода осуществляется с помощью дополнительного пассика 13. Как же работает такой лентопротяжный механизм?
При включении лентопротяжного механизма в режим рабочего хода промежуточный ролик 15 входит в зацепление с насадкой на валу электродвигателя 5 и маховиком 4, приводя последний во вращательное движение. В это время ролик 7 прижимает магнитную ленту 8 к ведущему валу 3, в результате чего начинается ее движение. В это же время начинает вращаться и правый узел 2, подматывая на приемную катушку прошедшую по тракту магнитную ленту. Натяжение магнитной ленты в режиме рабочего хода происходит благодаря торможению в неподвижном состоянии шкива левого узла 1. При этом между шкивом и подкатушником подающего узла действует только сила сцепления. Иначе решен вопрос и пространственной ориентации магнитной ленты по отношению к стирающей 9 и универсальной 10 магнитным головкам. Здесь установлено три неподвижных направляющих стойки 11, которые обеспечивают правильное положение магнитной ленты по отношению к плоскостям рабочих поверхностей магнитных головок и оси вращения ведущего вала. Необходимый угол обхвата магнитной лентой головок создается направляющим штифтом 16, который укреплен на одном рычаге с прижимным роликом. Изменение скорости движения магнитной ленты в таком лентопротяжном механизме осуществляется довольно просто: для этого нужно на вал электродвигателя поставить ступенчатую насадку 5, а промежуточный ролик 15 перемещать вверх или вниз с одной ступени на другую.
Режим ускоренного хода осуществляется перемещением бокового узла в сторону электродвигателя. Левый боковой узел 1 имеет обрезиненный обод на подкатушнике и при перемещении этот обод соприкасается с насадкой на валу электродвигателя непосредственно, а подкатушник правого бокового узла 2 соприкасается с насадкой через промежуточный обрезиненный ролик 14, который имеет некоторую свободу перемещения.
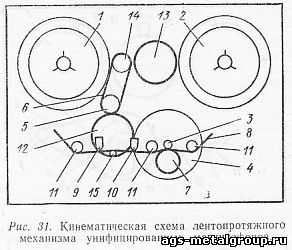
По такому же принципу, но несколько иначе построен лентопротяжный механизм унифицированных сетевых магнитофонов «Маяк-202», «Юпитер-202-Стерео», «Яуза-212» и других, кинематическая схема которых показана на рис. 31. Отличие, во-первых, заключается в том, что здесь боковые узлы неподвижны, а вращательное движение к ним передается с насадки на валу электродвигателя 5 через пассик 6 и промежуточный ролик 14, имеющий возможность перемещаться в сторону левого или правого бокового узла. Во-вторых, подмотка магнитной ленты в режиме .рабочего хода получается за счет передачи движения с ролика 14 через промежуточный обрезиненный ролик 13 на шкив правого бокового узла, который имеет фрикционное соединение с подкатушником. И в-третьих, при перемотке магнитной ленты в том или ином направлении увеличивается осевое давление шкива на подкатушник, что позволяет осуществлять работу бокового узла с небольшим проскальзыванием.
В рассмотренных нами кинематических схемах лентопротяжный механизм приводится в действие от одного электродвигателя, а переход из одного режима работы в другой производится механическим путем. По такому принципу построены лентопротяжные механизмы большинства магнитофонов, работающих как от электрической сети переменного тока, так и от автономных источников тока. Несмотря на различия в конструкциях, принципы работы лентопротяжных механизмов подобны, и, думаем, вы без труда разберетесь в них.
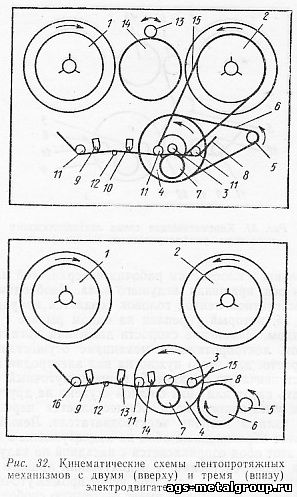
Однако, как мы говорили ранее, лентопротяжный механизм может быть построен и на двух электродвигателях, один из которых работает только в режиме рабочего хода, а с помощью другого производится перемотка магнитной ленты в обоих направлениях. На рисунке 32 вверху показан один из возможных вариантов построения кинематической схемы такого лентопротяжного механизма, используемый в магнитофонах «Комета-201», «Комета 209», «Орбита-2» и других. В нем вращательное движение в режиме рабочего хода передается с ведущего электродвигателя 5 через пассик 6 на маховик 4 и ведущий вал 3. Последний через насадку и пассик 15 связан со шкивом правого бокового узла 2 и приводит его во вращательное движение, осуществляя подмотку магнитной ленты. Переключение лентопротяжного механизма в режим ускоренного хода магнитной ленты производится дополнительным органом управления (специальной ручкой или клавишем), который, во-первых, включает дополнительный электродвигатель 13, и, во-вторых, перемещает промежуточный обрезиненный ролик 14 в сторону бокового узла, передавая вращательное движение с насадки на валу электродвигателя непосредственно подкатушнику, и, в-третьих, реверсирует дополнительный электродвигатель, то есть изменяет направление вращения его вала, что позволяет простым путем производить перемотку магнитной ленты в нужном направлении. Конечно же, этот дополнительный орган управления лентопротяжным механизмом обязательно должен иметь блокировку, исключающую возможность его включения во время рабочего хода магнитной ленты. В остальном работа этого лентопротяжного механизма подобна работе предыдущих лентопротяжных механизмов.
Наиболее прост лентопротяжный механизм, построенный на трех электродвигателях. Его кинематическая схема показана на том же рисунке внизу. Простота построения объясняется тем, что все управление лентопротяжным механизмом производится электрическим путем без применения рычагов, тяг, шлангов и других механических деталей. Поэтому по такой кинематической схеме строят преимущественно профессиональные магнитофоны и бытовые магнитофоны высшего класса. По такой кинематической схеме был построен, например, лентопротяжный механизм магнитофона «Днепр-12Н».
В трехмоторном лентопротяжном механизме боковые узлы 1 и 2 либо расположены непосредственно на валах электродвигателей, называемых в этом случае также боковыми и имеющими специальную механическую характеристику, либо связаны с боковыми электродвигателями-пассиками. При рабочем ходе магнитной ленты боковые электродвигатели работают в пониженном энергетическом режиме, осуществляя этим подмотку и подтормаживание магнитной ленты. Во время ускоренного хода магнитной ленты в зависимости от выбранного направления перемотки один из боковых электродвигателей переключается на номинальный режим работы, а другой электродвигатель остается на пониженном режиме работы, обеспечивая требуемое натяжение магнитной ленты.
Для протягивания магнитной ленты используется третий электродвигатель, называемый ведущим. Здесь также возможны два варианта построения лентопротяжного механизма. В первом случае вал электродвигателя является одновременно и ведущим валом, а во втором случае электродвигатель связан с ведущим валом через промежуточный обрезиненный ролик и маховик. В настоящее время почти исключительно используют второй вариант исполнения лентопротяжного механизма. Объясняется это тем, что при использовании вала электродвигателя в качестве ведущего вала к исполнению электродвигателя предъявляются очень жесткие требования, такие, как неизменность скорости вращения, точность диаметра вала, отсутствие его биения, чистота поверхности и другие требования, обычно предъявляемые к ведущему валу. Помимо этого, при таком построении лентопротяжного механизма практически возможно осуществить только две скорости движения магнитной ленты, так как конструкция электродвигателя на три скорости вращения вала хотя и возможна, но связана со значительными трудностями. А если нужны четыре скорости движения магнитной ленты? Это осуществимо только при втором варианте исполнения лентопротяжного механизма, где число скоростей движения магнитной ленты определяется лишь количеством ступеней в насадке на валу ведущего электродвигателя и механического перемещения промежуточного ролика, что с конструктивной точки зрения сделать довольно просто.
В трехмоторных лентопротяжных механизмах обычно принимают специальные меры, чтобы обеспечить наилучшие условия работы магнитной ленты. Для этого, например, на входе и выходе зоны магнитных головок и ведущего вала вместо неподвижных направляющих стоек используют вращающиеся направляющий ролик 15 и инерционный ролик 16. Кроме этого, применяют специальную следящую систему, которая управляет работой боковых электродвигателей, обеспечивая неизменное натяжение магнитной ленты от начала рулона к его концу.

